
MotoGP – Ajuste da Suspensão
terça-feira, 10 de dezembro de 2019 às 18:28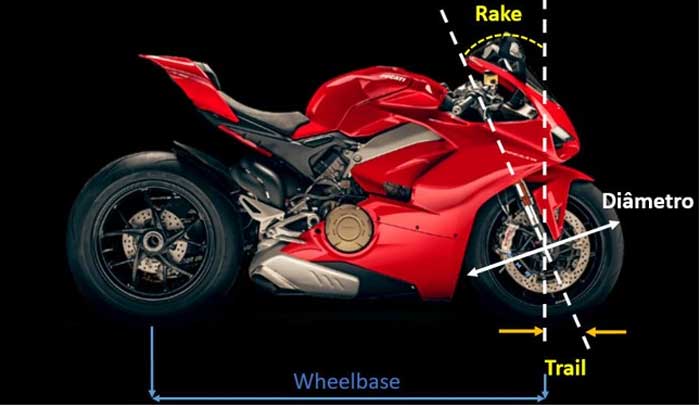
MotoGP – 2019
Colaboração: Carlos Alberto Goldani
Guillaume Amontons foi um inventor e físico francês que viveu entre 1663 e 1705. Em seu currículo constam aperfeiçoamentos em instrumentos de medição como barômetro (1965), higrômetro (1687) e termômetro (1695). A contribuição do francês aplicadas na MotoGP é com a a formulação das leis do atrito: (1) A força do atrito entre a roda e o piso é diretamente proporcional à carga (peso) aplicada; (2) A força do atrito independe da área de contato. Estas duas regras são complementadas pela lei de Coulomb que especifica que o atrito cinético independe da velocidade de deslizamento.
Os protótipos que participam da MotoGP são equipamentos complexos, embora os motores sejam lacrados antes da primeira etapa e a sua especificação permaneça inalterada durante toda a temporada, diversos componentes do chassi podem ser ajustados de acordo com as características de cada circuito para criar uma configuração (chamada de setup) mais competitiva. Existe um conjunto de elementos relacionados com aspectos importantes da geometria do quadro que podem ser modificados em função de condições do traçado ou aderência de piso, conhecidos pelos termos técnicos; rake, trail, wheelbase (distância entre eixos), centro de gravidade e anti-squat.
Conceitualmente a geometria é identificada apenas com as medidas físicas do chassi, entretanto estes valores são inter-relacionados, alterar um implica em modificar outros. Ajustar um equipamento não é simples, enquanto os valores de rake, wheelbase e trail são obtidos por medidas diretas, anti-squat e outros valores resultam de uma combinação de diversas dimensões.
Trail (trilha) é medida da distância do contato do pneu entre a vertical da roda obtido a partir do grampo triplo e o ponto onde o eixo de direção encontra o piso. Outras medidas importantes que afetam diretamente a geometria do equipamento são o rake, offset e diâmetro do pneu. Rake é a medida do ângulo do eixo de direção em relação a vertical, offset é o deslocamento entre a distância entre tubos do garfo e o eixo de direção dianteiro.
Geometria Dianteira – Rake e Trail
Na parte frontal o a medida do trail é o principal responsável sobre o comportamento da moto em curvas e sua estabilidade em linha reta. Trail é definido como a distância do contato entre a vertical do pneu dianteiro e a inserção do eixo de direção com o piso. O maior valor do trail aumenta o esforço do piloto necessário para conduzir o equipamento e resulta em maior estabilidade, reduzir o trail torna a direção mais leve e a moto menos estável. O maior ou menor valor do trail, de acordo com a segunda lei de Amontons, não implica em maior ou menor grip, força de atrito entre a roda e a pista.
O ajuste do trail pode ser obtido alterando duas das três dimensões utilizadas na sua composição, rake e offset, já que o diâmetro do pneu é fixo e definido pelo regulamento da competição.
Geometria Traseira: Anti-Squat
Squat não tem uma tradução literal que possa ser aplicada ao comportamento da suspensão traseira de uma moto. O termo mais aproximado é “agachamento”, a reação de buscar um equilíbrio de forças que atuam em um determinado momento sobre o equipamento. Squat indica a tendência da moto em baixar a suspenção traseira na aceleração como resultado da transferência de carga em função da tração aplicada. Uma maneira de compensar esta tendência é o anti-squat, uma característica de flexibilidade do chassi que trabalha para inibir a transferência de peso durante a aceleração. Nas últimas provas de 2019 uma sensível melhora no comportamento das KTM foi resultado de uma sugestão do piloto de testes Dani Pedrosa, a remoção de dois parafusos de fixação do motor no chassi de treliça da moto para aumentar a sua flexibilidade e colaborar com o anti-squat. Com a aplicação do torque gerado pelos motores no eixo da roda traseira os efeitos de squat e anti-squat têm uma disposição natural para aumentar.
O efeito de anti-squat é uma combinação de duas forças. A primeira é a força motriz do pneu traseiro, que atua apoiada no braço oscilante e tende a estender a suspensão traseira. Um exemplo prático, se a moto for bloqueada por uma parede sólida e uma pressão for exercida sobre o chassi, o ângulo do braço oscilante tende a reduzir estender a distância entre eixos. A segunda força é da correia que atua sobre o eixo e que também trabalha para ampliar a suspensão na maioria dos casos. A magnitude da contribuição de anti-squat da correia depende do ângulo e a da distância em relação ao braço oscilante. Estas duas forças atuam em conjunto com o efeito giroscópio (Autoracing, 23 de maio de 2016, MotoGP – O efeito giroscópio) para criar o melhor compromisso entre velocidade em retas e facilidade no contorno de curvas.
Existem diversos modos para expressar a magnitude do efeito anti-squat. O mais simples é usar uma porcentagem para indicar o quanto da transferência de peso é compensada, por exemplo, se seu efeito compensa 75% da transferência de peso na aceleração e a suspensão vai sofrer alguma pressão para baixo. Com 100% a transferência de peso é perfeitamente equalizada e a suspensão não apresenta efeitos devido à aceleração. Em mais de 100% reduz ângulo do braço oscilante e a suspensão é alongada. Este valor pode ser calculado pela localização exata da roda dentada dianteira, em conjunto com outras dimensões. O anti-squat é importante porque pode alterar o comportamento do chassi na saída de uma curva. Normalmente algum squat é desejável para carregar o pneu traseiro e obter maior tração, mas não pode ser suficiente para provocar o wheelie, fazer a roda dianteira perder o contato com o piso.
Quando a suspensão traseira desce, o ângulo do braço oscilante pode mudar consideravelmente em função das características anti-squat. Circuitos com equilíbrio entre retas e curvas a maioria das motos responde melhor se configuradas com o anti-squat pouco mais de 100% com a suspensão totalmente estendida, o que significa maior eficiência na aceleração e dirigibilidade nas saídas de curvas pela compensação da transferência de peso.
Centro de gravidade
Até este ponto nos referimos a ajustar o comportamento da frente ou traseira da moto, alterando o rake, offset, trail ou trabalhando a flexibilidade do chassi para compensar o resultado do squat ou anti-squat.. Evidente que é importante controlar qualquer mudança que levanta ou baixa o equipamento inteiro, porque a altura da moto tem importância vital em sua dirigibilidade. Um modo de avaliar a contribuição de todos estes atributos é o conceito de Centro de Gravidade (CG), o ponto onde convergem todas as forças que atuam na transferência de carga, aceleração, frenagem e inclinação em curvas, ou seja, o ponto de equilíbrio da moto inteira. Na maioria das motos de competição o CG, incluindo o piloto, deve estar a meio caminho entre a roda dianteira e traseira. A posição do CG influi no comportamento geral do equipamento. Uma moto com o CG mais elevado gerencia melhor a retomada de velocidade, frenagem e amplia os efeitos da transferência de peso, tende a trocar de direção mais rápido e exige menor ângulo de inclinação para contornar uma curva.
Adiantar o CG ajuda a manter a extremidade dianteira para baixo, aquece melhor o pneu dianteiro, contribui para ajudar com aderência frontal, mas a extremidade traseira terá maior facilidade para subir durante a travagem e o conjunto perder aderência. Baixar o CG pode significar menor arrasto, retomadas de velocidade mais eficientes e velocidade em trechos retos.
O comportamento do protótipo deve ser adequado às características do piloto, tem os que preferem trabalhar mais com a frente, outros com a traseira no contorno de curvas. O equipamento deve responder com a maior desempenho possível em cada caso, por isto é complicado, em uma mesma equipe, um só piloto responder pelo setup das motos.
Geometria dinâmica
O problema do ajuste ideal de uma moto é que fazer uma mudança em uma variável afeta um sem número de outros comportamentos na geometria, especialmente em protótipos que devem obedecer a padronizações draconianas como os equipamentos da MotoGP. Ainda assim as equipes conseguem ajustes limitados com alterações realizadas de modo indireto. Por exemplo, a Yamaha M1 pode mudar a altura de pivô do braço oscilante para conseguir maior anti-squat, mas isso também muda rake, trail e a altura do centro de gravidade. Muitas vezes uma única alteração pode introduzir mais problemas que soluções. Aumentando a complexidade, tudo o que foi citado acima é relacionado com o equipamento na vertical e na maior distância entre eixos, condição que quase não acontece durante uma prova.
Os números de geometria mudam constantemente à medida que a suspensão trabalha. Em travagem, por exemplo, a suspensão frontal é quase totalmente comprimida e a traseira estendida. Mudanças de peso, até pelo consumo de combustível, alteram significativamente o rake, trail e CG. Os movimentos do braço oscilante e os ângulos da correia alteram o comportamento da suspensão e podem até transformar um comportamento anti-squat em pró-squat em algumas condições.
As equipes de utilizam complexos softwares de simulação para prever o comportamento de mudanças na geometria dos equipamentos, que calculam características importantes baseadas em várias variáveis de entrada, entretanto nada compara a sensibilidade dos pilotos em testes para encontrar as condições ideais.
Carlos Alberto Goldani
Porto Alegre – RS
Quer ver todos os textos de colaboradores? Clique AQUI
Os artigos publicados de colaboradores não traduzem a opinião do Autoracing. Sua publicação obedece ao propósito de estimular o debate sobre automobilismo e abrir um espaço para os fãs de esportes a motor compartilharem seus textos com milhares de outros fãs.
Carlos Alberto Goldani, ducati moto gp, geometria suspensão moto gp, honda moto gp. yamaha moyo gp, ktm moto gp, melhor site moto gp, moto gp 2019, moto gp suspensaão, suzuki moto gp
ATENÇÃO: Comentários com textos ininteligíveis ou que faltem com respeito ao usuário não serão aprovados pelo moderador.